Sensor-to-Segment Alignment
Posted on November 20, 2024 by Peter Shull
Sensor-to-segment alignment: aligning IMU and anatomical reference frames
What is sensor-to-segment alignment?
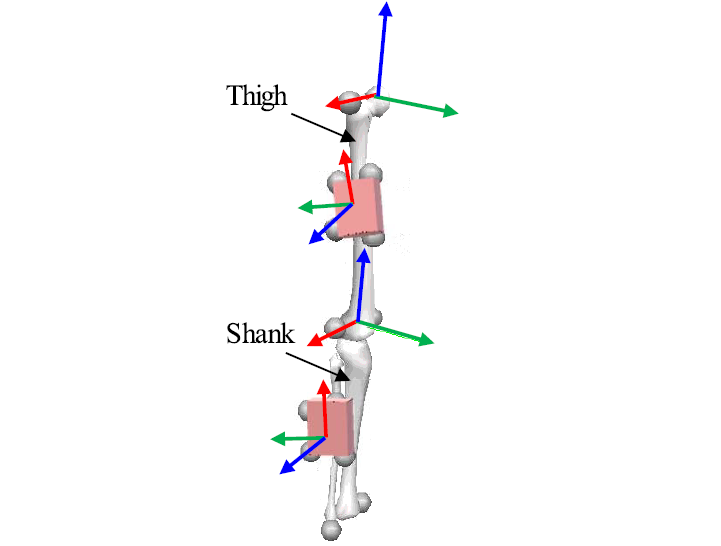
Sensor-to-segment alignment is the process of aligning inertial measurement unit (IMU) sensor reference frames with human anatomical reference frames. This enables body-worn IMUs to capture and estimate human movement in meaningful anatomical frames. The first attempts to estimate human kinematics with wearable inertial sensors go back to 1990 when Willemsen and colleagues attached pairs of single-axis accelerometers to the thigh and shank to estimate knee flexion angles. The accelerometers were carefully placed on the legs with bars aligned along the lateral side of the thigh and shank. Since then many wearable IMU approaches have been used for an expanding array of applications to estimate virtually every type of human movement.
Why is sensor-to-segment alignment important?
Sensor-to-segment alignment significantly impacts the accuracy of body-worn IMUs. In fact, previous studies have shown that sensor-to-segment alignment has a similar impact on IMU kinematics estimation accuracy as sensor drift (Sabatini 2006, Teufl 2018), and in some cases sensor-to-segment alignment error is even more important than sensor orientation error (Zhu 2023). Sensor-to-segment alignment errors effect accuracy even during short assessment trials when drift errors haven’t had time to propagate and increase.
How do you perform sensor-to-segment alignment?
The 3 most common ways to perform sensor-to-segment alignment are: Manual Alignment, Static Pose Calibration, and Functional Calibration.

Common Sensor-to-Segment Alignment Approaches. Manual alignment involves careful IMU placement, static pose calibration requires subjects to hold known static poses, and functional calibration leverages functional movements around known anatomical axes.
Manual Alignment
Manual Alignment
(click to replay)
Manual alignment involves manually placing the IMU to align with one or more of the anatomical axes and is analogous to how reflective markers are manually placed on the body for optical motion capture. There are several ways to perform manual IMU alignment including visually aligning the IMU and anatomical axis/axes, manually identifying bony landmarks, and/or using palpation calipers to identify bony landmarks. The pros of manual alignment are that it is a quick and straight-forward method for placing IMUs and doesn’t require additional calibration trials as part of the experimental protocol. However, like with reflective marker manual placement, IMU manual alignment will only be as good as the person placing the IMUs. When using this approach, care should be taken to ensure that all experimenters follow the same procedure for placing IMUs for each subject during each testing session. One manual alignment example for standing balance training is manually placing an IMU along the spine such that the IMU axis aligns with the vertical trunk axis to assess and train trunk front and side angles.
Static Pose Calibration
Static Pose Calibration
(click to replay)
Static pose calibration requires subjects to hold a fixed, known static pose, (e.g. T-pose or N-pose). IMU sensor axes are then aligned to the anatomical frames based on the known pose. The benefit of using static pose calibration is that IMUs can be placed at any arbitrary segment location and thus precise IMU placement is not as critical. This approach is also relatively quick, typically only requiring 4-5 seconds for a static pose calibration trial. However, static calibration requires all test subjects to hold consistent poses across all trials. In addition, in contrast to manual alignment, static pose calibration requires at least one extra calibration trial beyond the normal testing trials slightly increasing protocol testing and data process times. One static pose calibration example for drop landing training is to have the subject stand still and upright to begin the trial which sets the zero trunk side and forward angles and the zero knee flexion angle based on that initial posture.
Functional Calibration
Functional Calibration
(click to replay)
Functional calibration aims to align IMU axes based on subject movements around known anatomical axes. For example, repeated knee flexion/extension would enable an IMU attached to the shank to align to the anatomical medial-lateral knee axis. There are several ways to use functional calibration data to determine the anatomical axes such as simply averaging the gyroscope data to determine the major rotation axis or solving a kinematic constraint function. Besides joint rotations to align IMUs to anatomical rotation axes, walking along straight lines, in circles or in figure 8 patterns can help functionally calibrate the magnetometer by determining movement directions and to automatically filter out unwanted magnetic disturbances. The benefit of functional calibration is that, if done right, it has potential to be the most accurate, because it directly captures and aligns to movement about anatomical axes. It also doesn’t depend on either the experimenter to accurately place IMUs or the subject to accurately hold a fixed pose. The main drawback is that is it more time consuming requiring one or more extended movement calibration trials making data collection and processing more complex and time consuming and it is not guaranteed to perform better than manual alignment or static pose calibration.
Which alignment method is best?
Static Pose Calibration is the most commonly used, though it is not clear if this is always the best approach. It could be that Static Pose Calibration is most often used, because it is relatively quick and easy and doesn’t depend on precise IMU placement. However, research has shown that for the elbow joint Manual Alignment (Bonfiglio 2024) and Functional Calibration (Fang 2023) are more accurate than Static Pose Calibration. Thus, the optimal sensor-to-segment alignment approach may differ by anatomical joint. And this is reasonable given the different degrees of freedom and range of motion across different anatomical joints. Even the elbow and knee joints, which have roughly the same range of motion and are often considered one-degree-of-freedom joint, have fundamentally different anatomical axes because the forearm can pronate and supinate, while the shank can not. Thus, many researchers have proposed using multiple methods together, such as combining Static Pose Calibration and Functional Calibration.
Optimal sensor-to-segment alignment remains unsolved and is an active area of research. Others have thus proposed alternative, novel methods such as machine learning and subject specific models or self-calibration. Some have even proposed taking pictures and manually adjusting misalignment based on the location of the IMU on the body as shown in the picture.
To learn more about various traditional and more recently proposed approaches for sensor-to-segment alignment, take a look at the sensor-to-segment alignment review papers in the section below.
Find Out More
Want to learn more? Check out these related papers:
[Paper 1 - ISB recommendations for estimating joint kinematics with IMUs]
[Paper 2 - Lower Body sensor-to-segment calibration methods]
[Paper 3 - Upper Body sensor-to-segment calibration methods]
[Paper 4 - Review of different IMU approaches for kinematic estimation]